来源 :全志科技2026-04-08
近日,第十三届开源操作系统年度技术会议(OS2ATC 2026)在北京语言大学顺利举办。作为国内聚焦开源操作系统领域的专业行业盛会,本次大会汇聚了产业链上下游众多核心机构、高校与企业。全志科技受邀出席本次盛会,以《机器人实时控制方案的实践与挑战》为主题发表主旨演讲,呈现全志在机器人领域的软硬件协同技术成果与产业实践。
本次演讲中,全志科技深度分享了基于Tina-IESP平台以及多个开发套件,共同优化机器人控制领域实时性核心痛点的技术实践,以及机器人应用场景下的落地成果与行业技术发展方向,为开源技术在机器人与工业控制领域的规模化落地提供了成熟、稳定、可靠的解决方案。
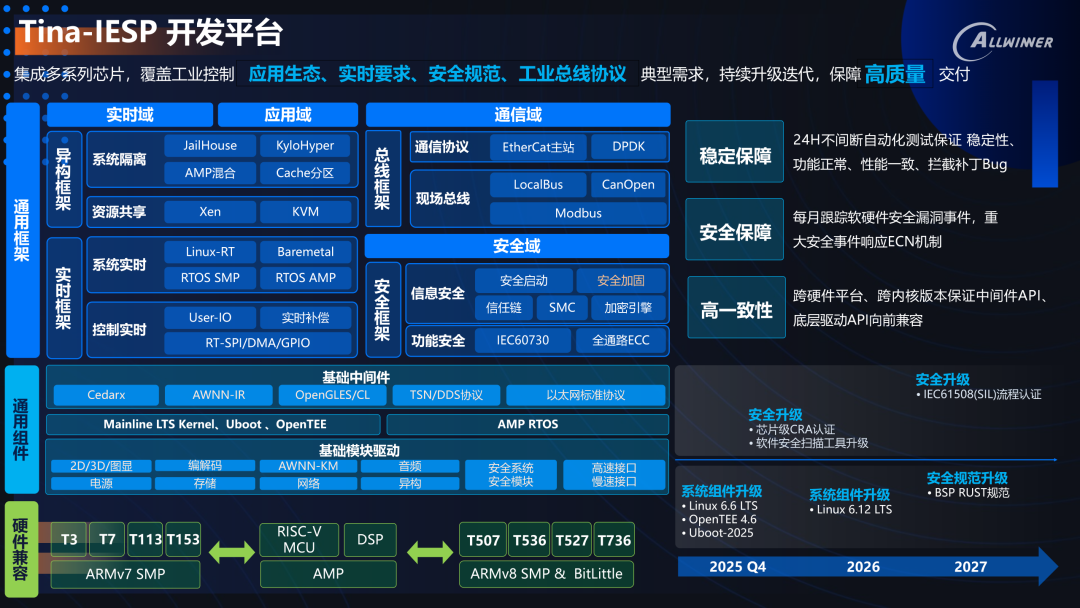
围绕工业客户核心需求,全志打造了高可靠、开放兼容的工业嵌入式软件开发平台Tina-IESP(industry embedded software platform,全志工业软件平台),并联合产业链上下游伙伴构建工业生态共同体,为客户提供易评估、易开发、高可用的工业解决方案。平台搭建了异构框架、安全框架、通信框架、实时框架四大核心模块,兼容KVM、Xen、JailHouse 等主流虚拟化技术,支持EtherCAT、Modbus、CANopen 等主流工业协议,并适配 Linux-RT、Xenomai、FreeRTOS 等主流开源实时操作系统。同时,平台通过常态化自动化测试体系保障系统长期运行稳定性,配套月度安全漏洞跟踪机制与重大安全事件应急响应体系,实现跨硬件平台、跨内核版本的 API 向前兼容,可有效降低行业客户的开发与迁移成本。
基于Tina-IESP开发平台,全志科技打造了涵盖开发、适配、落地的机器人应用解决方案,推出三大核心开发套件AIoT、ROS 及AWNN Devkit:
AIoT Devkit:深度适配Debian、openEuler、OpenHarmony等主流操作系统,兼容多种主流UI框架与AI工具链,并支持各类主流开源工业协议,为客户提供开箱即用的开发体验;
ROS Devkit:专为机器人场景深度优化,具备跨平台兼容、模块化架构、硬件加速优化、异构算力调度等核心特性,适配ROS2开源机器人操作系统,目前已在清洁机器人、工业机器人、ROS开发板等场景实现规模化落地;
AWNN Devkit:为机器人端侧AI应用提供Turnkey级一站式支持,配套成熟完善的模型转换、量化、优化工具链,内置工业安防、工业相机、机器人视觉、机器人交互应用场景内的成熟落地算法,可助力客户快速实现端侧AI应用的部署落地。


目前,全志机器人解决方案已实现对扫地机、割草机、服务机器人、机器狗等主流机器人品类的多应用适配,可为客户提供定制化开发与深度优化的技术支持。
围绕机器人实时控制技术的发展,全志从软硬协同与多架构发展两大维度,系统阐述了该领域的技术演进路径与行业实践逻辑。软硬协同层面,可通过硬件物理级定制、指令集优化、原生资源隔离等技术,匹配机器人运动控制、视觉感知、大模型端侧推理等核心任务需求,突破控制频率瓶颈,降低多任务运行干扰,实现AI任务与控制链路的紧耦合,保障端侧AI推理的确定性与实时性。多架构发展层面,SMP、RTOS、BareMetal等技术架构可协同适配不同机器人的差异化需求,在高端机器人控制器采用多域融合架构,并通过构建统一的开发框架与软件栈,打通模块间技术壁垒,降低机器人行业产品开发成本。
全志已搭建起覆盖多场景的工业智能SoC产品矩阵,以T系列工业芯片与MR系列机器人专用芯片为核心,实现多层级算力的覆盖,为工业控制与机器人产业筑牢了稳定、高效、高适配的硬件底座。未来,全志将持续深耕开源操作系统与机器人实时控制技术,以更优的软硬件系统解决方案,携手行业伙伴与开源社区,持续赋能,共同推动机器人产业的技术升级与规模化落地。